
Kéréon
Le phare de Kéréon est un enfer, malgré un intérêt patrimonial évident, une problématique se pose : comment rendre le phare accessible aux visiteurs.

Le phare de Kéréon est un enfer, malgré un intérêt patrimonial évident, une problématique se pose : comment rendre le phare accessible aux visiteurs.

Le projet SISTER (Surface Imaging Solution for TEmperate Reefs) vise à fournir aux gestionnaires des outils efficaces pour surveiller de manière détaillée les récifs d’hermelles.
Le projet JUMANGI (Jumeaux nUMériques d’une situation d’Assistance médicale en milieux isolés par l’usage de la réalité mixte et des interactions taNGIbles augmentées) repose sur le principe de collaboration entre 2 utilisateurs potentiellement distants l’un de l’autre (ex. l’un sur Terre, l’autre dans l’ISS ou sur Mars) ou d’une équipe en milieu isolé devant solliciter une expertise distante (ex. sur Mars, station Concordia, désert, pleine mer, …).
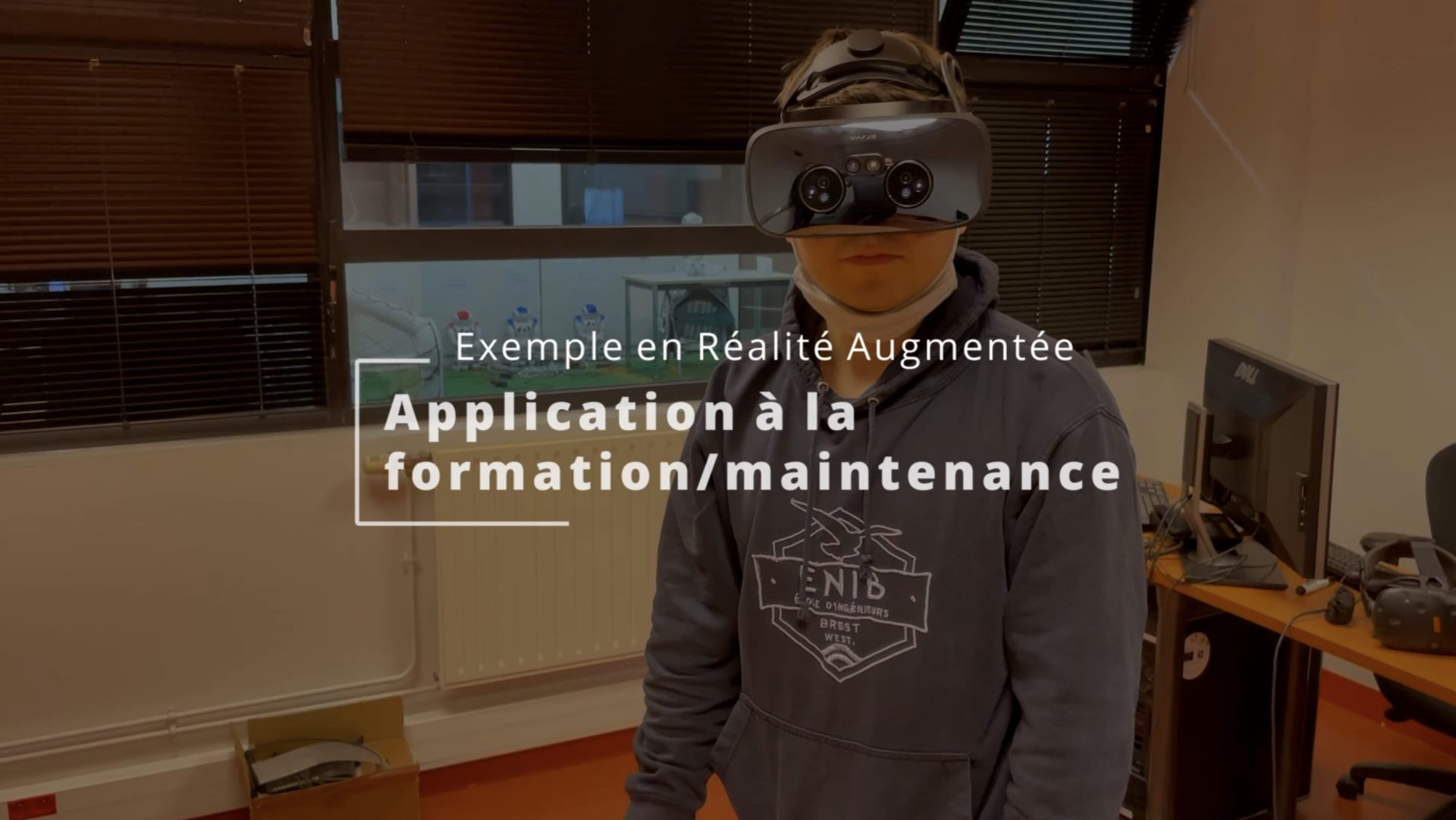
Thales conçoit et développe des équipements et systèmes de mission électronique notamment pour le domaine de la Défense. Les cycles de vie de ces équipements chez les clients peuvent durer jusque 40 ans. Thales assure donc leur support technique pendant des périodes très longues, entre autres, en proposant des services de type formation et moyens d’entrainement.

Les C2 (Command & Control) ont pour but d’aider un poste de commandement militaire à gérer ses ressources, à donner ses ordres et surtout à comprendre la situation tactique en réalisant une synthèse des informations connues.